Dynamic Weighing for accurate Fertilizer Application
The mass flow of fertilizer spreaders must be calibrated for different
types of fertilizer. To obtain an accurate fertilizer application a manual
calibration procedure has to be repeated frequently.
An automatic calibration is possible when actual fertilizer mass flow is
known. One method to determine mass flow is to monitor the weight decrease
of the spreader during fertilizer application. When spreader weight differs
significantly from the applied amount of fertilizer according to the current
calibration, the dose controller calibration is adjusted.
In this research a dynamic weighing system for automatic flow controller
calibration is presented (figure 1). Monitoring of spreader weight also
offers the opportunity to log spreader performance, which is important for
on farm evaluation of crop yield to the applied fertilizer strategy.
Materials and Method
Two strain gauge load cells are mounted on a frame between tractor
hitch and spreader as sketched in the figure below. The entire spreader
rests vertically on load cell A, suspended by a reversed parallellogram.
Load cell B measures a known load which gives information on vertical
acceleration and on inclination of the spreader.
Results
The dynamic weighing filter algorithm consists of a low pass filter for
the load cell signals and a proportional correction from load cell B on
load cell A. Figure 3 shows the results of filtering and correction of a
dynamic signal acquired at 2 m/s driving velocity on rough surface.
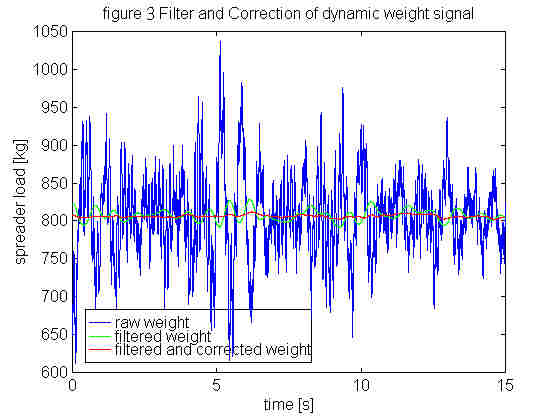
The filter and correction procedure delay is 1 second and the standard
deviation of the determined mass is 1.8 kg for this experiment.
The algorithm to adjust the calibration of the flow controller is based
on a linear regression between predicted weight decrease at current calibration
and weight decrease measured by dynamic weighing.
A calibration adjustment is permitted when the level of the 99% confidence
interval of this linear regression coefficient is equal to or below the
accuracy of the current calibration.
With an initial calibration accuracy preset at 10%, a simulation shows how
the algorithm starts to adjust calibration after a mass decrease of 35 kg.
A calibration accuracy of 1% is reached after spreading approximately 150 kg.
of fertilizer.
From research environment to farm practice
For the 1997 season the above described dynamic weighing system
has been implemented on a farmer's equipment. The objectives where
to record actual applied amount of fertilizer to be able to relate
yield maps to fertilizer strategy in an on farm evaluation of
precision farming.
A dual spinning disc type fertilizer spreader
for mineral fertilizers is weighed continuously. Fertilizer rate
settings and applied amount are recorded by equipment
mounted in the tractor. Tractor operating conditions like
motor RPM, radar and wheel velocities and position (DGPS) complete
the dataset. See tractor and spreader while loading fertilizer:


A detailed view on the weight measuring implementation; the
orange painted weighing derrick equipped with load cells between the
spreader and tractor.


A view inside the tractor cabine. Two computers reside on board; leftside
the
Mueller Elektronik equipment to control the fertilizer rate dependent of
driving speed and to record task data. On the righthand the touchscreen of the
datalogging equipment.
The datalogging computer is mounted beside the chair; yes, it 's becoming
busy in the cab, but luckily a place was found for the strain gauge
amplifier on top of the former passenger seat. Finally, the DGPS system
was small enough to reside near the computer.
Post processing of the obtained data yielded maps of applied fertilizer.
The detailed measurements indicated fertilizer flow actuator malfunctioning
which the farmer previously had noticed too. Additional EMC suppression was
needed to increase accuracy of the fertilizer rate control.
For the 1998 growing season the strain gauge amplifier is going to be
replaced by an integrated sigma delta converter. The system will be
modified to be able to connect an Agricultural BUS for electronic
data transfer. A Controller Area Network (CAN) node on the spreader
performs dynamic weighing and control of the spreader and is connected
through CAN to the boardcomputer running a virtual terminal and taskcontroller.
The picture below shows the single board computer to be used as electronic
heart of the fertilizer spreader. It features a Siemens SAB167 16-bit
microcontroller with integrated CAN bus controller.

 Back to Index
Back to Index